
Robot de estampado de 4 ejes para prensa



Introducción del producto
En vista de la demanda real de actualización y transformación de la industria del estampado, se diseñó y desarrolló un robot de manipulación de estampado de 4 ejes de control simple y alta flexibilidad.
El robot de estampado de cuatro ejes adopta un diseño de cuatro ejes, es compacto, de tamaño pequeño y ligero, y se utiliza ampliamente en soldadura por arco de argón, paletizado, manipulación, estampado y otros campos. Ofrece un manejo estable y una soldadura precisa. El manipulador de punzonado de cuatro ejes permite realizar operaciones de estampado con flexibilidad en un espacio reducido, y es fácil y cómodo de instalar y depurar.
Partes principales
Todas las piezas son de marcas chinas de alta calidad
Servomotor
El servomotor es de marca china Ruking, con ventajas como una reacción rápida y una alta relación par/inercia en el par de arranque, entre otras. Soporta condiciones de funcionamiento rigurosas con frecuentes aceleraciones y desaceleraciones hacia adelante y hacia atrás, y soporta varias sobrecargas en poco tiempo.
SISTEMA DE CONTROL LNC
El robot Yooheart adopta programación didáctica. Su funcionamiento es sencillo, práctico y flexible. También admite programación remota, lo que permite aplicarla en diversos programas complejos.
CUERPO DEL ROBOT
El cuerpo adopta el proceso de fundición a presión, utilizando la cavidad del molde para aplicar alta presión a la formación del metal fundido, el cuerpo forma alta densidad, fuerte rigidez, su propio peso es más liviano.
Mostrar detalles
Alta precisión
Respuesta de acción rápida
Y el nivel va liderando
en el país
Simple en estructura
Fácil de mantener
Más rentable
Alta velocidad y estabilidad
Camino preciso
Soluciones de estampación perfectas
Parámetros del robot
| Proyecto | Especificación | Proyecto | Especificación | Eje | Rango de movimiento | Velocidad máxima | Diámetro hueco |
| Eje | 4 | Temperatura | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Capacidad | 3,7 kVA | Humedad | 20-80 % HR (sin humedad) | J2 | +10º~+125º | 120º/s | —— |
| Peso | 170 kg | Vibración | Menos de 4,9 m/s² | J3 | +10º~-95º | 120º/s | —— |
| Carga útil máxima | 10 kg | Otros | No se permiten gases ni líquidos inflamables ni corrosivos, mantener alejado de fuentes de ruido eléctrico. | J4 | ±360º | 200º/s | —— |
| Rango máximo de trabajo | 140 cm | Repetibilidad | ±0,08 mm | Nivel de IP | IP65 | Instalación | Suelo |
Aplicación de robot
Carga y descarga de productos de extrusión en caliente
Este proyecto se centra principalmente en el conformado de estampación de cobre. El proceso de punzonado en rojo es un proceso de extrusión en caliente. Durante el punzonado en rojo, el metal se calienta a una temperatura determinada y se introduce en un molde precalentado. Tras un movimiento alternativo de la máquina herramienta de presión, el metal se deforma plásticamente para obtener el tamaño, la forma y las buenas propiedades mecánicas requeridas para las piezas estampadas. El cliente utiliza el robot de manipulación de 4 ejes Yooheart para cargar y descargar la pieza de metal punzonado en rojo.
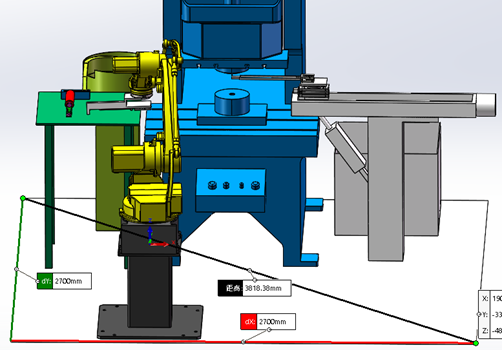
Descripción general de la solución de integración
El proyecto consta de una punzonadora, un robot Yunhua de 4 ejes y 10 kg, herramientas de posicionamiento secundario, un dispositivo de corte de cilindros, etc. Los datos conocidos, como el tiempo de trabajo, la carga nominal y las condiciones de trabajo, se encuentran dentro del rango de parámetros nominales del HY1010B-140.


Descripción general del proceso de producción
Alimentación manual para polipasto ▶ Alimentación de placa vibratoria ▶ Posicionamiento del dispositivo de alimentación antes del calentamiento ▶ Calentamiento del tubo por corrientes de Foucault ▶ Posicionamiento del dispositivo de posicionamiento secundario ▶ Sujeción del robot ▶ Prensado de punzonadora ▶ Descarga del dispositivo de alimentación de cilindros
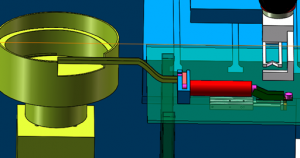
Resumen de la acción del dispositivo de alimentación y posicionamiento
Alimente manualmente la placa vibratoria ▶ La placa vibratoria es el suministro de material para el tubo de calentamiento por corrientes de Foucault ▶ La herramienta de posicionamiento secundaria es el posicionamiento de la abrazadera del robot
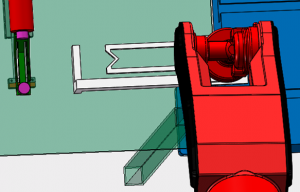
Descripción general del funcionamiento del dispositivo de sujeción
El robot sujetará el material de cobre posicionado ▶ para la formación del punzón
Servicio posventa
Contamos con un servicio posventa perfecto para ayudarle a aprender el funcionamiento incluso si nunca ha utilizado robots industriales y resolver problemas durante su tiempo de uso.
Primero, proporcionaremos los manuales relacionados para ayudarlo a comprender cierta información sobre el robot.
En segundo lugar, ofreceremos una serie de videos didácticos. Podrás seguirlos paso a paso, desde el cableado y la programación sencilla hasta la realización de programas complejos. Es la manera más eficiente de ayudarte en la situación actual de la COVID-19.
Por último, pero no menos importante, le ofreceremos servicio en línea con más de 20 técnicos. Si tiene alguna pregunta, puede contactarnos en cualquier momento y le ayudaremos con prontitud.


Solicitud de cotización
P. ¿Es esto seguro para los trabajadores?
R. Claro, una de las ventajas de usar robots para pick and place es proteger a los trabajadores de lesiones. Un trabajador puede manejar de 5 a 6 máquinas CNC.
P. ¿Qué tipo de producto puede utilizar el robot de carga y descarga?
A. Cada cargador robótico puede equiparse con herramientas de extremo de brazo compatibles con su máquina y producto. Son extremadamente precisas y tienen la destreza necesaria para manipular la pieza con cuidado.
P. ¿Solo se puede utilizar un extremo de las herramientas del brazo para cargar y descargar el robot?
A. El brazo robótico industrial puede modificar el programa y la pinza de agarre, cambios rápidos en el almacenamiento inteligente, velocidad de depuración, eliminando la necesidad de empleados pero también del tiempo de capacitación, se puede poner rápidamente en producción.
P. ¿Tiene algún otro mérito el robot de carga y descarga?
A. Mejorar la calidad de la pieza de trabajo Apariencia: líneas de producción automatizadas por robots, desde la alimentación, sujeción, corte completamente por robots, para reducir los eslabones intermedios, la calidad de la pieza se mejora enormemente, especialmente la superficie más hermosa.
P. ¿Pueden suministrar soluciones completas para robots de carga y descarga?
A. Por supuesto, podemos hacerlo junto con nuestro distribuidor.
Categorías de productos
-

YH1006A-175: Robot de soldadura de 6 ejes para alta preci...
-
Robot de soldadura MIG de 6 ejes para rack de almacenamiento
-

Estación de trabajo de soldadura por arco robótica de 7 ejes
-

Paletizador robótico de 6 grados de libertad y 165 kg de carga útil
-
Robot de soldadura TIG con alimentador de alambre
-

Robot de soldadura por arco de piezas de automóvil



